2018/04/20
深海4,000mでマッピング&写真撮影を競う 決勝進出の日本チームを支える『音響通信』
日本チーム、海洋探査の国際レースで決勝進出!
2018年3月、海底探査技術の世界的なコンペティション「Shell Ocean Discovery XPRIZE」(以下、「XPRIZE」)で、日本の若手研究者からなるチーム「Team KUROSHIO」が予選を突破。19チームのうち9チームが10月に開催される「Round2実海域競技」(決勝である!)に進出することが発表された。賞金総額700万ドル(約8億円)を目指して、これからまさに水面下の激しい戦いが繰り広げられることになる。
そもそもは、海底油田などを開発する際に行う海底地形調査のコストと時間を削減することを目的としたコンペティションで、開催スポンサーはヨーロッパ最大のエネルギー会社「Royal Dutch Shell plc」だ。
この「XPRIZE」、めちゃくちゃアツい国際コンペティションなのだ。なにしろ舞台は深海4,000メートル。250平方キロメートルという広大なエリアに無人の海中ロボットを放ち、事前に設定された10カ所のチェックポイントを撮影、24時間以内に海底地形の立体的な地図を作成するという、冒険とロマンに満ちあふれた闘いなのである。
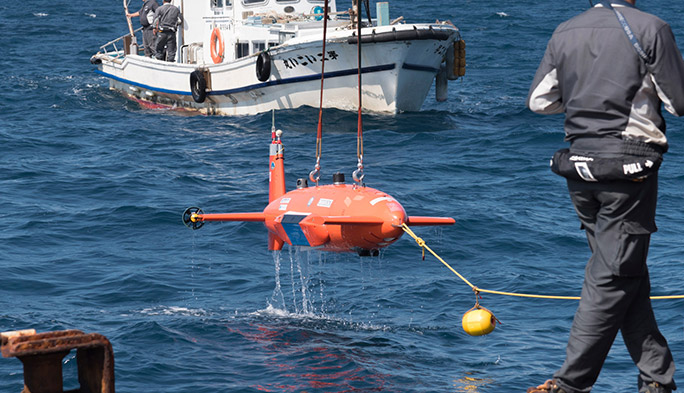
 写真は、駿河湾沖約10kmの洋上で行われた「Team KUROSHIO」の実験の模様
写真は、駿河湾沖約10kmの洋上で行われた「Team KUROSHIO」の実験の模様
「Team KUROSHIO」は、現在日本から参戦している唯一のチームだ。チームは、JAMSTEC(国立研究開発法人 海洋研究開発機構)、国立大学法人東京大学生産技術研究所、国立大学法人九州工業大学、国立研究開発法人海上・港湾・航空技術研究所、三井E&S造船株式会社、日本海洋事業株式会社、株式会社KDDI総合研究所、ヤマハ発動機株式会社からなる。
「Team KUROSHIO」の戦術はこうだ。
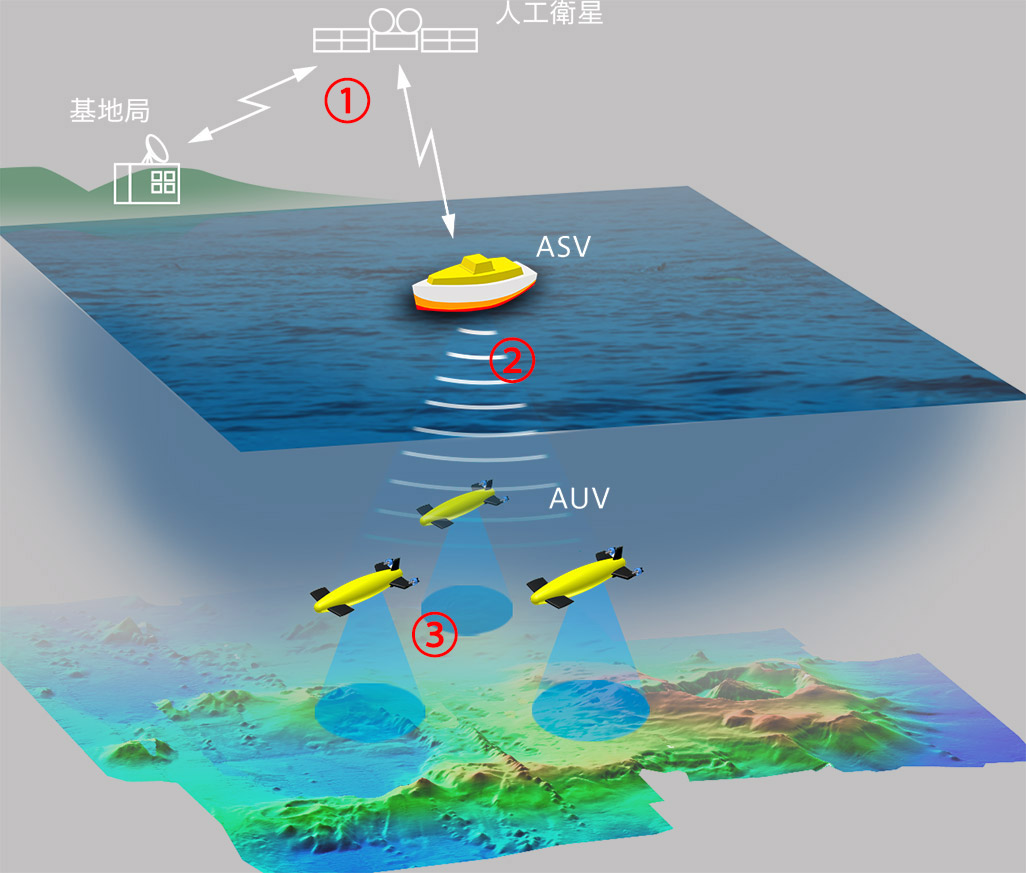
①陸上の基地局から衛星経由でASV(洋上中継機)を操り、3機のAUV(自律航行型海中ロボット)を連れて調査海域まで航行。
②目的のポイントに着くと、AUV(自律航行型海中ロボット)は自動的に潜行。
③マッピングしたデータや画像を、ASV(洋上中継機)を通じて陸上の基地局に送る。
これがASV(洋上中継機)。

で、オレンジ色のがAUV(自律航行型海中ロボット)。

ロケットっぽいが、ロボット。自分で海中に潜航し、海底を探査するのだ。
 AUV(自律航行型海中ロボット)は実験なのでクレーンで海中に入れていますが、本番では自律的に航行する
AUV(自律航行型海中ロボット)は実験なのでクレーンで海中に入れていますが、本番では自律的に航行する
「XPRIZE」の目的を、冒頭で「海底地形調査のコストと時間の削減」と書いたけれど、そもそも現状の海底探査は、とにかく「現地に行く」ということをしなければ始まらないのだ。
探査のやり方は、ダイバーが直接潜るとか、有人潜水艇を使うとか、あとAUV(自律航行型海中ロボット)自体も実用化されているけれど、陸上からすべてを管制することはできなかった。「XPRIZE」で無人航行の一定の成果が出れば、「行かなくて済む」ようになる。当然コストも時間も削減でき、海底油田の開発だけでなく、ケーブルの敷設やメンテナンス、鉱物の採掘など、海底でのいろんな仕事の効率が飛躍的にアップするのである。
「Team KUROSHIO」は、民間がそれぞれ得意分野の知見を持ち寄って成り立っている。では、KDDIはどんな分野で貢献しているのか。
そもそも主力となるAUVを開発
こちらはKDDI総合研究所環境計測プロジェクトリーダーの小島淳一。「Team KUROSHIO」で使用されるAUV(自律航行型海中ロボット)のひとつ「AE2000」を開発したのがこの人だ。
構築するネットワークは大きく2種類。まずは衛星通信。ASV(洋上中継機)は、調査する現場の海域までAUV(自律航行型海中ロボット)を引き連れていくわけだが、これらと陸上にある基地局とを衛星を介して結ぶのである。これは電波を用いた、ごく一般的な通信ネットワーク。
そして音響通信。海上にいるASV(洋上中継機)と海中で作業するAUV(自律航行型海中ロボット)を音波を介して結ぶのである。というのも、水中では電波が通じないから。AUV(自律航行型海中ロボット)は音波を使って地形や画像や現在位置を海上のASV(洋上中継機)に送るのである。
そしてこの音響通信こそ、小島が従事している研究なのだ!

「私たちが担当するのは、ロボットが正しく動いているかを遠隔監視すること。探査したデータはすべてロボットの中に記録されるのですが、それがきちんと行われているか、うまくロボットが航行しているかをモニターし、すべての探査が終わったときに“上がってこい”と指示を出すのにも音響技術は欠かせません」
AUV(自律航行型海中ロボット)は海中にいるので、電波はつながらない。通信はすべて音波を介して行われるのだ。競技中に具体的に行うのは……。
「GPSのデータは海中まで届かないので、それを音波で送ります。海底地形の地図を作るために、ロボットは自分の位置を常に正確に知る必要があるんです。あとはロボットから時々データを上げてきて、正常に稼働しているか、バッテリー残量や電圧に問題はないかというようなことを見ます」
もっとも神経を使うのは、潜行時と浮上時。3機を並行して自律航行させねばならないし、洋上から各ロボットに位置を知らせ、適切な“車間距離”を保って航行するよう指令を出す必要がある。海中音響通信は、まさに海中でのAUV(自律航行型海中ロボット)の動きをすべて司るといってよいだろう。
海中で通信を行う「音響」の技術、なにによって培われたのか
小島は1981年に国際電信電話株式会社(現・KDDI)に入社以来、AUV(自律航行型海中ロボット)の研究に従事してきた。
研究内容は、電波が使えない海中での音波を使った海底地形計測。音を出して、その跳ね返り方で海底の様子を把握するわけだ。また、AUV(自律航行型海中ロボット)と、海上で待機する支援船とのあいだのやりとりも音波通信が利用されており、海底ケーブルの敷設や保守に役立っている。敷設時に「どこにケーブルを埋めるべきか」を判断し、メンテナンス時には「どこにケーブルを埋めたか」を確認するために、位置計測の精度の高さが要求され続けてきた。

「1997年に『AE2』というAUV(自律航行型海中ロボット)が完成して、それをベースに2001年に今の『AE2000』を開発しました。そもそも、海底ケーブルの敷設に使う予定ではあったのですが、当初から幅広い目的に合うように作っていたんです。海底石油・ガス、水産海洋生物の調査、海底資源のありかを調べたり……」
調査対象が変わればAUV(自律航行型海中ロボット)に搭載するセンサーは変わるが、海中と洋上をつなぐ音響通信自体のあり方は変わらない、いわば“インフラ”のようなもの。この部分の技術が確立されれば、多様な分野に応用できるのである。
陸上での通信は「5G」を念頭に高速・同時多接続・低遅延という方向に進んでいるが、海中音響通信は「用途に合わせて色々な用途で使えるように研究していった感じです。遠く離れて通信したい人もいるだろうし、200メートルとか水深の浅いところでつなぎたい人もいるでしょうしね」
海中音響通信はさまざまな分野で鍛えられてきた
ちなみに、約300人が所属するKDDI総合研究所において、AUV(自律航行型海中ロボット)を追究していたのは、なんと、小島ただひとりだった。だが、外部の研究機関との連携でさまざまな展開を見せた。
1990年代から日本のAUV(自律航行型海中ロボット)研究の第一人者であった浦環東京大学教授と頻繁に情報交換を重ねるうち、「海洋生物の観測に活用しよう、ということになったんです。そして2000年にクジラの観測を行いました」
 AUV(自律航行型海中ロボット)にクジラの音を解析する装置を搭載。こちらは小笠原海域での様子
AUV(自律航行型海中ロボット)にクジラの音を解析する装置を搭載。こちらは小笠原海域での様子
東京大学生産技術研究所と共同で調査を開始。小島の開発した自律型水中ロボットを使って、沖縄県・座間味と小笠原の海域でマッコウクジラを追尾。水深1,000メートルまで潜ることもあるマッコウクジラの水中での動きは、船からだと知ることができない。そこでAUV(自律航行型海中ロボット)にハイドロフォン(水中マイク)を装備、クジラの発する音を記録・解析し、よりリアルな生態を知ることができたのだ。
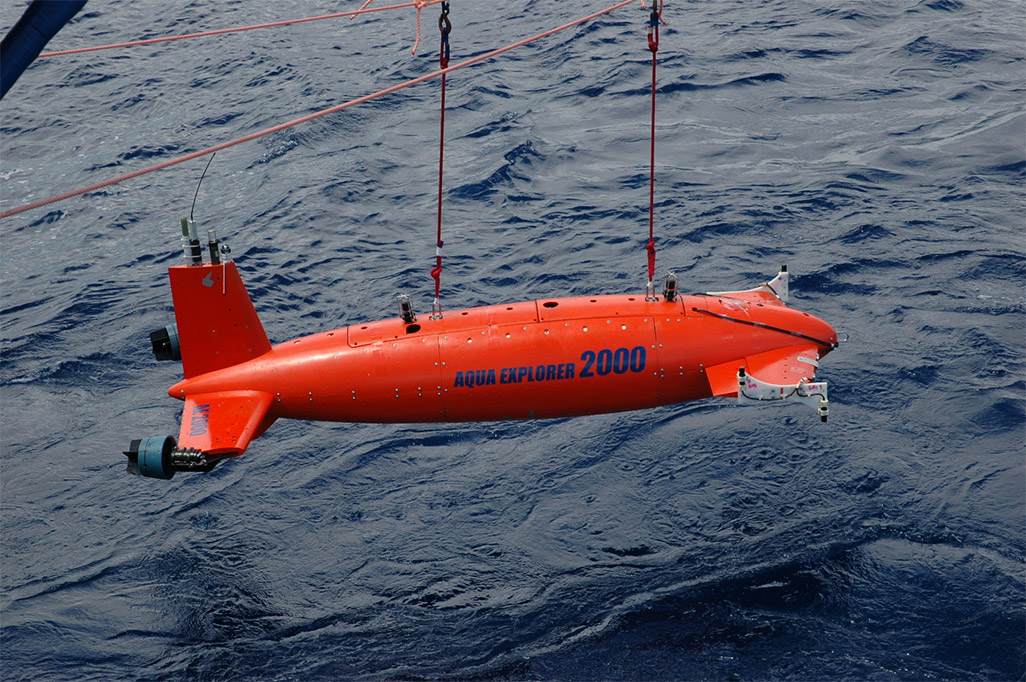 「AE2」をベースに作られた水深2,000mまで潜れる「AE2000」。これはマッコウクジラの音を聞くための水中マイクロフォンを前翼に装備
「AE2」をベースに作られた水深2,000mまで潜れる「AE2000」。これはマッコウクジラの音を聞くための水中マイクロフォンを前翼に装備
その調査の過程でKDDI・東大チームは、インドのWWFインディアとインド工科大学チームに合流。2007年より、絶滅危惧種であるガンジスカワイルカの生態観測を行うことになった。
「私たちは、水中ロボットの位置測定技術を使って、音による観測装置を開発しました。従来は水棲生物の生態を知るには、動きを記録する小型の記録装置を吸盤などを使って取り付けたりしていましたが、私たちのシステムではカワイルカに一切触れることなく、彼らの三次元的位置を解析することができるのです」
 ガンジスカワイルカ。ガンジス川の濁った水中に生息し、目はほとんど見えない。コミュニケーションは頭部の超音波で行う。/写真提供=WWFインディア
ガンジスカワイルカ。ガンジス川の濁った水中に生息し、目はほとんど見えない。コミュニケーションは頭部の超音波で行う。/写真提供=WWFインディア
 上のボートには小形音響観測機器を搭載。ガンジス川を移動しながら、ガンジスカワイルカの発する超音波をキャッチする。手前の船には手前は長期観測システムが
上のボートには小形音響観測機器を搭載。ガンジス川を移動しながら、ガンジスカワイルカの発する超音波をキャッチする。手前の船には手前は長期観測システムが
海中でのセンシング技術は、これらと並行してKDDIのベーシックな用途にも貢献してきた。つまり、新たに海底ケーブルを敷設する際の地形調査や、すでに敷設した海底ケーブルをメンテナンスする際にケーブルの場所を探し出すというツールとして。
そしてチームはふたりに
「海中での音響通信技術って、ほかの通信会社さんはほとんどノータッチな世界なんです。KDDIがこうした突出した技術を持っているというのは素晴らしいことだと思うんです」
そう話すのは、もうひとりのメンバー。KDDI総合研究所環境計測プロジェクトの西谷明彦。
彼は入所以来、「分散ファイルシステム技術」や「サイレント障害検知技術」などの研究に従事してきた。簡単に言うと、前者は、ネットワークでつながった複数のストレージから的確にデータを読み出し、書き込むための仕組み。後者は、コンピュータシステムの診断機能では見つからないような障害(サイレント障害)を見つけ出すための技術。……つまり、まったく無縁な分野から音響通信の世界にやってきたのだ。
「よそにない独自の素晴らしい研究を小島さんがずっとひとりでやってこられていたので、音響通信の火を消したくない、なんとか継承していきたいと思ったんです」
そんな純粋な思いと熱意で、音響通信研究に従事することを決めた。そして「XPRIZE」が始まり、今やその研究の火は消えるどころか、轟々と勢いよく燃え盛っている。西谷は、スペシャリストとして「Team KUROSHIO」に参加することになった感慨もひとしおだという。
「ついに民間の大手から大きなニーズが来たなと。この分野も研究開発した技術を事業化するのが困難だったんです。ですので、『XPRIZE』は、まさに“いよいよだな!”という気持ちです」
ともあれ、目指すは優勝。そしてこれまで打ち込んできた研究にきちんと日の目を見せること。
「AUV(自律航行型海中ロボット)を完全自動制御し、複数台同時管制する……プレッシャーもあるけど、それがまた研究員にとっては醍醐味ですね。日本は海洋国家ですから、この技術が今後、絶対役に立ちますし、若い人たちには“え、研究所こんなことやってんの? 俺もやりたい!”って思ってもらえるとうれしいですね!」(西谷)
「これまで繰り返してきた実験はいわば“庭”。海外での本戦は未知の体験です。技術的なレベルだけでなく、現場でうまく対応できるかどうか難しいところもあるでしょうね。『Team KUROSHIO』は若手中心のメンバーで、サバイバルな経験も少ないから、心配なところも多いけれど(笑)、やっぱり初めてのところに行くのはワクワクするよね!」(小島)
 「Round2実海域競技」への進出を果たした「記念盾」を手に決意を新たにするKDDI総合研究所の西谷明彦と小島淳一
「Round2実海域競技」への進出を果たした「記念盾」を手に決意を新たにするKDDI総合研究所の西谷明彦と小島淳一
そして2018年10~11月、決勝の「Round2実海域競技」の開催が予定されている。磨きに磨いた音響通信技術は、「XPRIZE」に旋風を巻き起こすか。深く、静かに注目していてほしい。
文:TIME & SPACE編集部
撮影:稲田 平
※掲載されたKDDIの商品・サービスに関する情報は、掲載日現在のものです。商品・サービスの料金、サービスの内容・仕様などの情報は予告なしに変更されることがありますので、あらかじめご了承ください。