2017/07/24
深海2,000mの激闘! 海底探索レース『Shell Ocean Discovery XPRIZE』日本代表に迫る
我々を乗せた船は5月の駿河湾の海風を切って快調に進んでいく。いつもは両舷に10人ずつほどの釣り人を乗せて航行する小さな釣り船だ。今、船上にいるのは、大手新聞社と「TIME & SPACE」の2メディア。甲板で波しぶきを受けては声を上げ、目の前に巨大な富士山を認めてはテンションを上げる。駿河湾の約10km沖合、港から1時間ほど走ったころ、「それ」は姿を現した。
台船にクレーン車が固定され、ヘルメットに作業着の人々が見える。クレーン車の奥にはコンテナとプレハブの小屋がL字型に配置されている。

今年10〜11月に開催される「Shell Ocean Discovery XPRIZE」第1ラウンドに向けてのテストがここで行われているのだ。
Shell Ocean Discovery XPRIZEとはなにか
それは、「XPRIZE財団」というところが開催している海のレース。
「XPRIZE」って聞いたことあります? 「Google Lunar XPRIZE」。あれは38万km離れた月面での、宇宙レース。月までロボット探査機を送り、着陸地点から500m以上移動し、高解像度の動画や静止画を地球に送るというもの。日本からは「TEAM HAKUTO」が参戦し、auがスポンサードしています。
なにを競うのかというと、海底地形図の作成と海底画像の撮影。スポンサーはロイヤル・ダッチ・シェルという世界的な石油会社だ。海底油田の開発には事前の海底地形の調査は必須で、このプロセスにめちゃくちゃコストがかかるらしい。ダイバーが直接潜るケースもあれば、有人潜水艇を使ったり、洋上から遠隔操作無人探査機をケーブルで操ったり、AUV(Autonomous Underwater Vehicle=自立型海中ロボット)に探査させたりと、海底の調査にはさまざまなやり方がある。
調査方法は調査対象に応じて選べばいいのだけれど、どの手段であっても「目的の海域まで船で行く」ということが前提となる。しかもその際、調査対象の専門家と、各種装置を扱う技術者をそれぞれ連れて行かねばならないのだ。
こんなふうに。
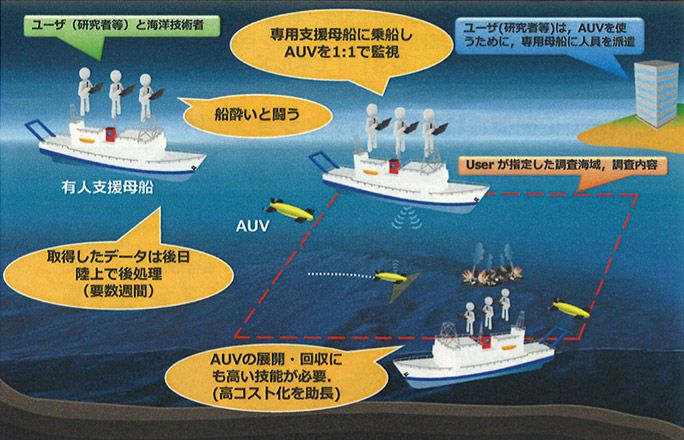
たとえばAUVは非常に調査精度が高いが、そのぶん扱うのが難しい。調査海域で海中に放つのも船上から監視するのも、回収するのも高いスキルが必要。そうした技術者を長期間確保せねばならないし、研究者も日程を合わせて船旅をしなければならない。ものすごく卑近な心配だがリアルに大変な「船酔い」もある。海洋研究者と海洋技術者のスケジュールを合わせ、一定期間拘束し、実際に現地まで“船旅”することが必要になるわけで、コストがかかりそうな感じ、ありありと伝わりますよね?
海底油田の開発だけでなく、海底ケーブルの敷設や鉱物の採掘などにも事前の海底地形調査は必須。 このコスト軽減こそが「Shell Ocean Discovery XPRIZE」最大の目的。それは、海底でお仕事をするありとあらゆる産業に恩恵を与えることになる。
で、そのために今回のレースで設定された最大の条件が「現場の調査海域に人が行かずに、全部、陸上から遠隔でやろう!」 というものなのだ。
具体的なルールは以下のとおり。
-
<目標>
超広範囲(500㎢)の海底マッピング。<ルール>
有人支援母船レスでのオペレーション(海域へのロボットの展開・回収含む)
持込制限:40feetコンテナ 1個
調査時間制限:調査後48時間以内の海底地形図の作成<実海域試験Round1>
2017年10~11月開催。
水深2,000mで16時間以内に最低100㎢以上の海底地形調査、海底ターゲットの写真撮影(5枚)。<実海域試験ROUND2>
2018年9月開催。実海域試験Round1を勝ち抜いたチームが進出する。水深 4,000mで 24時間以内に最低250㎢以上の海底地形調査、海底ターゲットの写真撮影(10枚)。
2015年12月に開催を発表。翌年9月に参加登録を締め切り、今年2月に書類審査で世界32チームから21チームに絞られた。日本からは3チームがエントリーし、選ばれたのが「Team KUROSHIO」。 我々が目指す台船(作業用の箱船)の主だ。
このチームは、JAMSTEC(国立研究開発法人 海洋研究開発機構)、国立大学法人東京大学・生産技術研究所、国立大学法人九州工業大学、国立研究開発法人海上・港湾・航空技術研究所、三井造船株式会社、日本海洋事業株式会社、KDDI総合研究所、ヤマハ発動機株式会社からスペシャリスト達が集った。
昨年12月から、何度かテストを実施しており、我々は5月の海域試験にお邪魔したのだ。
Team KUROSHIOはどんなふうにレースに臨むのか。
ここから先、英語の頭文字略語が頻出するが、言い換えようがないので、頑張ってついてきていただきたい。Team KUROSHIOはASV(Autonomous Surface Vehicle=洋上中継器)を1機使い、3機のAUVとともに調査海域まで航行。ASVは陸上からの電波を海中のAUVへ音波で中継し、AUVからの通信を陸上へ送り返す役割を担う。

このオレンジの3つの機体がAUV。手前から自動的に海中の地図をつくる「AE2000a」、真ん中が詳細な3D画像観測をし、海中の写真を撮ってくる「AE2000f」。これら2機は東京大学生産技術研究所が開発したもの。奥の丸い機体が海上・港湾・航空技術研究所開発の「航行型2号機」。潜水艦っぽいが、ロボットだ。

で、こちらのゴムボートがASV(洋上中継器)「ORCA」。レースでは無人で運用されるが、日本では、無人航行が認められていないので、海域試験では便宜上、有人で運用している。このASVが上で紹介したオレンジ色の3機のAUVたちを引き連れて調査海域まで行き、現場で解き放つ。で、AUVたちは自動的に海域の地形調査と写真撮影を行い、自分でASVまで戻ってくる。その後またORCAが3機を引き連れて陸まで戻ってくることになっている。
ゴムボートがいわば“母船”。ちょっと頼りない気もするけれど「現場に持ち込める機材は40フィートのコンテナ1個に収まらねばならない」というルールがある。AUVもASVもその他必要な機材もすべて、である。つまり、コンパクトな機材で精度の高い海底探査ができることが重要なのだ。

テストは、冒頭にも書きましたが駿河湾の沖合10㎞に浮かぶ台船に司令室を設えて行っている。左写真のコンテナが、それ。中では海中を探査するAUVと海上で中継するASVの動向をモニターしている。

今回は海上試験なので、司令室を台船上に設置し、ASVとAUVの動きをモニタリングしているが、本番のレースでは、それらの作業はすべて陸上から行う。


AUV「AE2000a」の潜行。本番では、陸からASVに先導されて調査海域まで到達するが、テストではクレーンで吊り上げて着水。その後は螺旋を描きながら海底200mまで潜行する。潜行し始めると、ASVが管制。ゴムボートの右舷に出っ張っている白いアーム。コレが発信機。
海上にいるASVは衛星からの電波をキャッチできるけれど、電波は海中では通じないので、ここから音波に変えて、AUVに位置情報などを伝える。
で、AUVは海中で自律的に地形データを取得したり、写真を撮ったりするわけですが、そうしたAUVの動きに合わせてASVがついていくという仕組み。
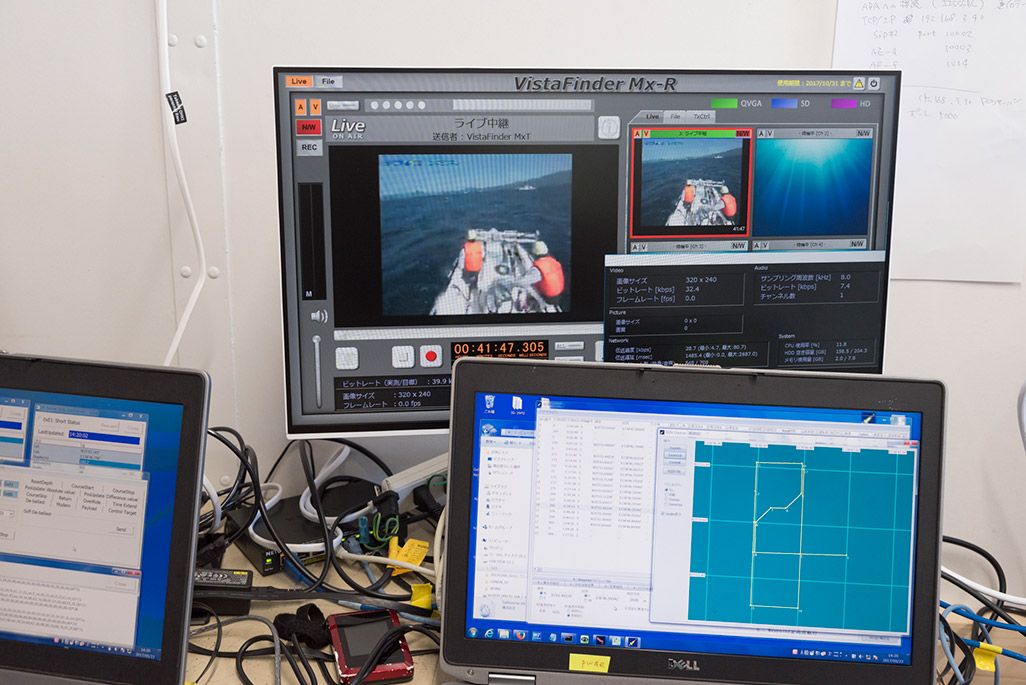
モニタリングルーム内。ASVとの通信は、遠隔作業支援システム「VistaFinder Mx」を使用している。上のモニターに映し出されているのは、ASVに設置したカメラからの映像。
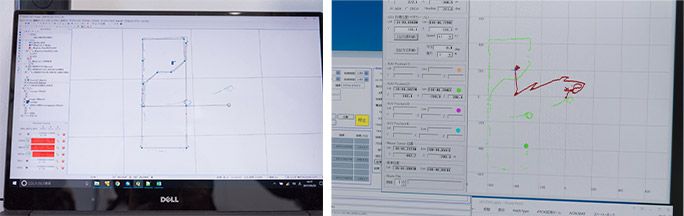
左は、この日AUVが海中でたどるべきコース。画面中央右の丸印から左に進み、画面上に向かい、途中で右斜め上に進路をとる。右上に達したら、反時計回りに大きな長方形を描くよう設定されている。ちなみに長辺が700〜800m、短辺が約300mだそう。
で、右がこの日ASVとAUVが実際に海でどんなふうに動いたかのログ。赤いラインがASVの航跡。ASVは海上の風と潮の流れの影響を受けつつもAUVと通信できる範囲で移動している。一方、緑のわりとカチッとしたラインがAUVの航跡。左の写真のコースとよく見較べてみてください。長方形の上半分がほぼ一致していますね。完全な長方形になっていないのは、AUVからASVに送られる位置情報が時々途切れるから、らしい。
「Team KUROSHIO」絶好調! だから公開できるんです!

JAMSTECから参加している「Team KUROSHIO」共同代表のひとり、大木健さんに話を聞くことができた。
「今日はAUVのいろいろな動きが試せるコースをつくって走らせてみましたが、なかなかうまくいきました。本番のレースの時、AUVは基本、自律的に走ります。人間はその海域に行ってはいけないので、陸上から暖かく見守るしかなくて。ただコースを外れたり、なにかあったりすると指令を出すことはできます」
完全にAUVが自律的に動く必要はない。重要なのは「人間が現場に行かなくて済む」点。
「我々のAUVはすでに海底探査の実績を積み重ねていますので、ロボットそのものに対する信頼性が高まってきています。今まで有人支援母船がついていっていた作業をASV(洋上中継器)に安定的にやらせること、そこで複数のAUVを同時に管制することが今後のポイントですね」

大木さん、「Google Lunar XPRIZE」における宇宙での戦いにも決して負けていないという。
「我々が相手にしている海の中は、常に海水という粘度の高い液体に遮られている環境なので、通信も音波頼り。常時水圧を受け、太陽から電力を補給することもできず、消耗していくなかで戦わねばならないんです」
そして、実際、非常にイノベイティブ。「Google Lunar XPRIZE」の目的は、「民間による宇宙開発」。国家ベースではすでに実現できている技術を、広く民間でもできるようにすることを目指している。それに対して「Shell Ocean Discovery XPRIZE」は、海洋地形調査の低コスト化をテーマに、「これまでにない海洋探査技術を実用化する」という視点。ゼロを1にする醍醐味がある。
スポンサーはロイヤル・ダッチ・シェルという世界的な石油会社で、低コストでの広域海底地形調査が実現できれば、すぐにも採用されかねない。各チームは主催者と守秘義務契約を結び、多くのチームが手の内を見せないまま本番に臨もうとしている。
「今回の取材もそうですが、我々は積極的にやり方を公開しているんです」
なぜ公開してしまうのか? という我々の質問に、大木さん、笑顔でこう答えてくれた。
「情報をメディアに公開できるチームは完成度の高い準備ができている必要があります。だからこそメディアを通じてみなさんから応援してもらえるし、スポンサーも集められる。私たちもそうありたいと考えているんです」
10月のRound1に向けて、「Team KUROSHIO」、自信をのぞかせるのである。
実用化を目指して火花バチバチで行われる「Shell Ocean Discovery XPRIZE」。次回は、「Team KUROSHIO」で、海中での重要な技術を担っているというKDDI総合研究所の役割について。しばし待たれよ。
※なお記事内にある2017年10~11月開催予定の「実海域試験Round1」は、「Round1技術評価試験」に変更になりました。
2018年3月8日 Shell Ocean Discovery XPRIZE 「Round2実海域競技」(決勝)進出決定
文:武田篤典
撮影:稲田 平
※掲載されたKDDIの商品・サービスに関する情報は、掲載日現在のものです。商品・サービスの料金、サービスの内容・仕様などの情報は予告なしに変更されることがありますので、あらかじめご了承ください。
