2015/08/21
目の前の障害物を軽々ジャンプ! 進化するMITのチーターロボット
動物や昆虫、魚など、生物をモデルにしたロボットはたくさんあるが、日本の場合、どちらかといえば愛嬌のあるキャラクター的なデザインに仕上げられることが多いのに対し、アメリカではよりリアルさを求めるケースが多い。
たとえば、米国防総省の機関である、国防高等研究計画局のDARPA(Defense Advanced Research Projects Agency)らの資金援助を受けたボストン・ダイナミックス社では、4つ足で坂道や荒れ地を歩く犬型ロボットや、蹴飛ばしても自力で起き上がる馬型ロボットを開発しているが、オンラインで公開したところ "あまりにもリアルすぎて不気味"といわれるほど、精密な動きが実現されている。
MIT(マサチューセッツ工科大学)が開発した最新型のチーターロボットはさらにリアルで、リモコンやケーブルなどの補助無しに、時速8kmのスピードで走りながら、目の前の障害物の高さを自動で判断してジャンプするという、ほとんど動物に近い機能を持っている。実際に、大学のキャンパス内で動かしているビデオも公開されているが、メカニカルな見た目とは違って、動物らしい動きを見せている。
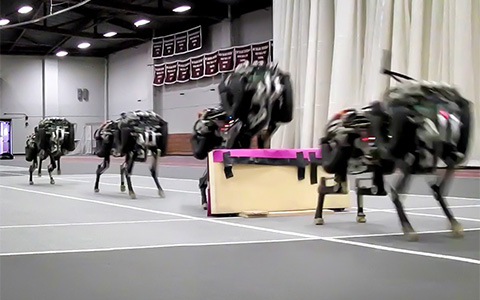
写真提供:Haewon Park, Patrick Wensing, and Sangbae Kim.
動物の動きをロボットに取り入れる研究は、バイオミミクリー(生物模倣)やネイチャーテクノロジーと呼ばれる学問として1997年から提唱されている概念で、これまでは主にデザインの面で取り入れられてきた。最近では、動きや生態系全般をプログラミングするなど活用の範囲が広がり、ロボット開発分野でもいかに動物に近い性能を持たせるかといった研究が進んでいる。
前述のDARPAで、ロボットチャレンジプログラムと呼ばれる、ロボットコンテストの運営マネージャーを務めるギル・プラット氏は、ロボット開発技術に求められるポイントは、Autonomy(自立性)、Mobility(移動性)、Speed(速さ)、Cost(コスト)、Energy Efficiency(エネルギー効率)の5つで、そこでは多くが動物の生態系をモデルにしたバイオミミクリーの研究が基礎になっているとコメントしている。
さらに後押ししているのが、高性能のカメラや障害物を検知するためのセンサー技術、ディープラーニングと呼ばれる自己学習機能である。チーターロボットの場合、これまではあらかじめジャンプする障害物の位置や高さをプログラミングする必要があったが、今では、目の前にある障害物の高さや距離をカメラやセンサーで正確に捉え、それを基にどれだけの高さと角度を飛べば、スピードを維持したままジャンプできるかを徐々に計算し、学習する。特にディープラーニングは画像認識力へ応用しやすく、チーターの運動能力だけでなく、獲物を捉える視力までも再現されているといえる。
チーターロボットを開発する2人の研究者は、具体的にチーターロボットを街中でクルマ代わりに荷物を運んだり、人を乗せたりする道具への応用を目指しているという。その場合、4つ足のほうが安定感があり、障害物をよけたり、狭い道や坂道の上り下りもしやすいという。また、歩道や街中を人と一緒に歩いても違和感のないように、現在はモーターやギアなどの独特の騒音の解消を目指していると語っている。
これまでのロボットは、工場や建築現場など、あまり人が目にしない場所で使われていたが、すでに医療や介護、ショッピング、エンターテインメントなど、身近な場所で見かけるようになってきている。今はまだ機械扱いだが、動物そっくりに進化したロボットたちがペットショップに普通に並ぶようになるのも、そう遠くないのかもしれない。
文:野々下裕子
