2017/04/14
KDDI総合研究所の自動スマホ充電ロボ スマホを探す姿がいじらしくも愛くるしいと話題に

昨年7月、Googleが主催する公募プロジェクト「Android Experiments OBJECT」。200以上の応募があり、選考を経た現在ではグランプリ4作品と、特別賞2作品がプロトタイプを開発しました。また、3月には二子玉川の蔦屋家電にてこれらの入賞作が一堂に会するイベントも開催されました。
多くの作品のなかで、KDDI総合研究所の「充電ロボ」が特別賞を受賞。円筒形な形状と、ユニークな動きで話題になりましたので、さっそく実機を見に行きました。
 ドッキングするとこんな感じ
ドッキングするとこんな感じ
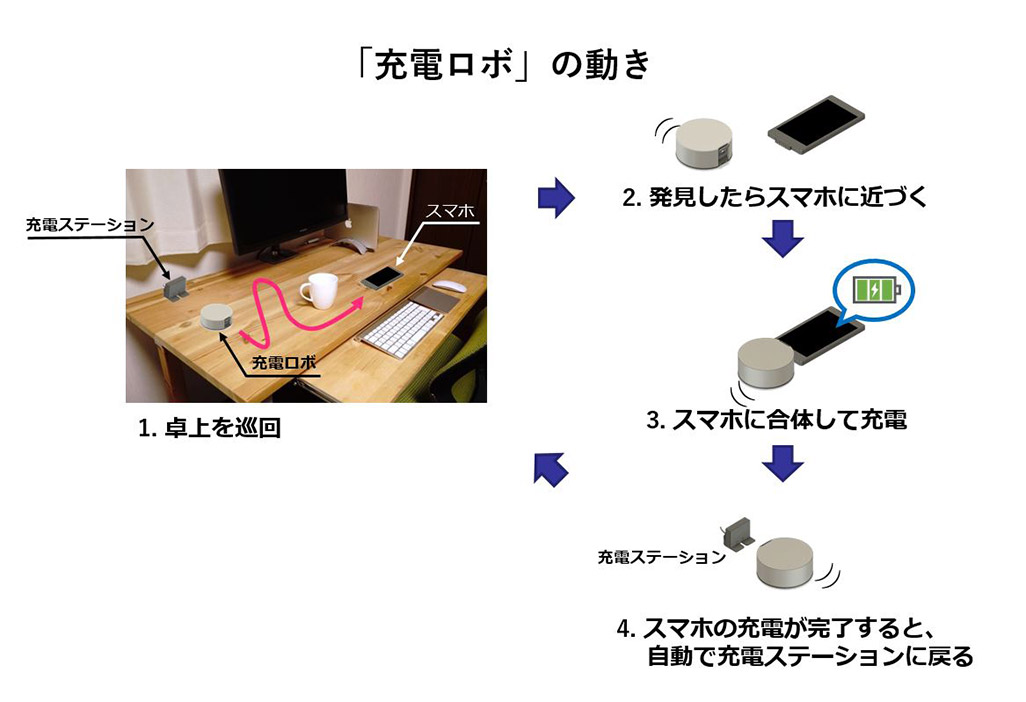
この充電ロボ、スマホのコネクタ側に回り、狙いを定めたように見事ドッキングしてスマホ充電開始! という予定の"卓上スマホ自動充電ロボ"なんですが、そこはプロトタイプのご愛嬌。数回やり直したのち、ドッキング成功時にはおもわず歓声があがるという、なんとも愛嬌のあるガジェットでした。
まぁ人間ですら、ときに充電ケーブルを1発で挿せないこともありますからね。どうやってコネクタを探し、ドッキングに至るのか? KDDI総合研究所でこのロボを開発した久保健さん、花野博司さん、関口直紀さんに話を聞いてみました。
■ あえてドッキングにこだわった「充電ロボ」
 写真左の「充電ロボ」。上部の丸い部分にカメラのレンズが
写真左の「充電ロボ」。上部の丸い部分にカメラのレンズが
――充電ロボはどうやってスマホ側の充電コネクタを探しているんですか?
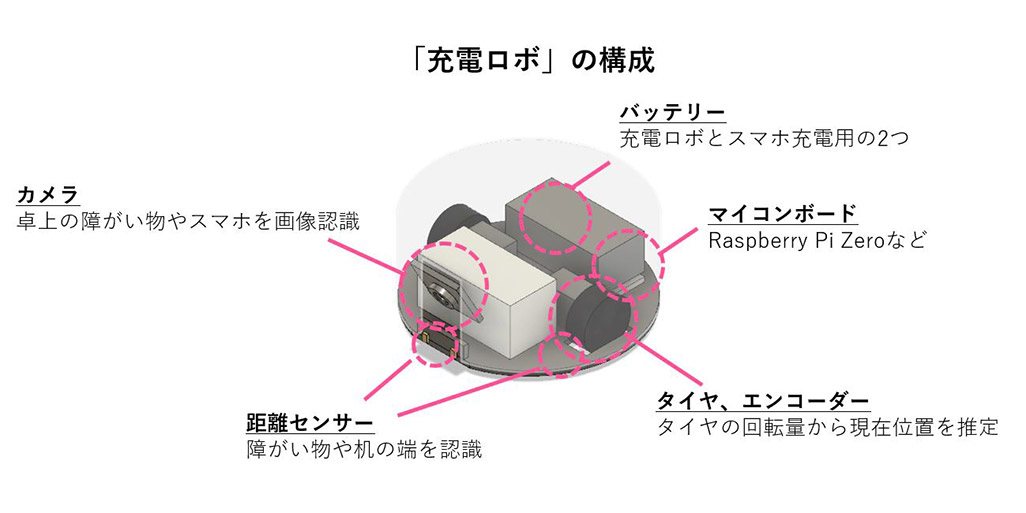
「前面に配置したカメラを通して画像解析を行い、スマホの場所とコネクタの位置を検出しています。スマホはそれぞれ異なるデザインとはいえ、形や大きさはそんなに変わりませんし、コネクタのある位置も大体同じです。コネクタの位置を検知すること自体は技術としてそれほど難しくはありません。画像処理やシステム制御を工夫することで、安価な部品のみで高度な動作を実現させています」
――そもそも手で挿した方が早いと思うのですが、わざわざ充電ロボに託すという発想がユニークですし、コネクタを探す動きがいじらしくて、愛着さえ湧いてきます。なぜ充電ロボを開発しようと思ったのでしょうか?
「発端は、面倒くさがりの私の性格にあります(笑)。スマホの充電でいちいちケーブルを挿したり抜いたりするのって面倒じゃないですか。近づけるだけで充電できる無線充電器もありますが、給電効率がそれほど高くはありません。自動的に充電ケーブルを抜き差ししてくれる製品が発売されるのを待ち望んでいたんですが、これがなかなか登場しない。
そんななか、このコンテストの存在を知ったんです。給電コネクタのある自律ロボットならコンテストのテーマである"Androidとつながる"にも合致するので、まあ遊び心も存分に発揮しながら開発をスタートしました」
――形はやっぱり、お掃除ロボに影響を受けているのでしょうか?
「充電ロボなのでスマホに供給するための電気のほかに、自分が動くための電気も必要です。当初は『ロボならやっぱり足が必要だ!』と、4足歩行ロボとして開発を始めたんですが・・・・・・。スマホにたどり着く前に電気を使いきってしまって、さすがに本末転倒ということになり今の形に落ち着きました。お掃除ロボを真似したわけでなく、効率を追求してこの形になったわけです」
KDDI総合研究所が目指す"卓上"の自動運転技術の未来
――充電ロボは今後どう進化していきますか?
「今後、クラウドと連携して障がい物がよく置かれる場所を学習してあらかじめ回避したり、それぞれの充電ロボが学習したことを共有するようなネットワーク化の仕組みなども考えています。」
なるほど、この小さい机の大きな夢を、机上の空論で終わらせないためのアイデアは、どんどん膨らむんですね。
こんな遊び心にみちたロボットが卓上に登場したら、IoTの技術をより身近に感じられるかもしれませんね。
充電ロボを手にする開発メンバーの一人、花野博司さん
文:のび@び助
写真:稲田 平
※掲載されたKDDIの商品・サービスに関する情報は、掲載日現在のものです。商品・サービスの料金、サービスの内容・仕様などの情報は予告なしに変更されることがありますので、あらかじめご了承ください。
